Down-hole Drilling Control and Automation for Oil & Gas Production (Funded by National Science Foundation CAREER Award)
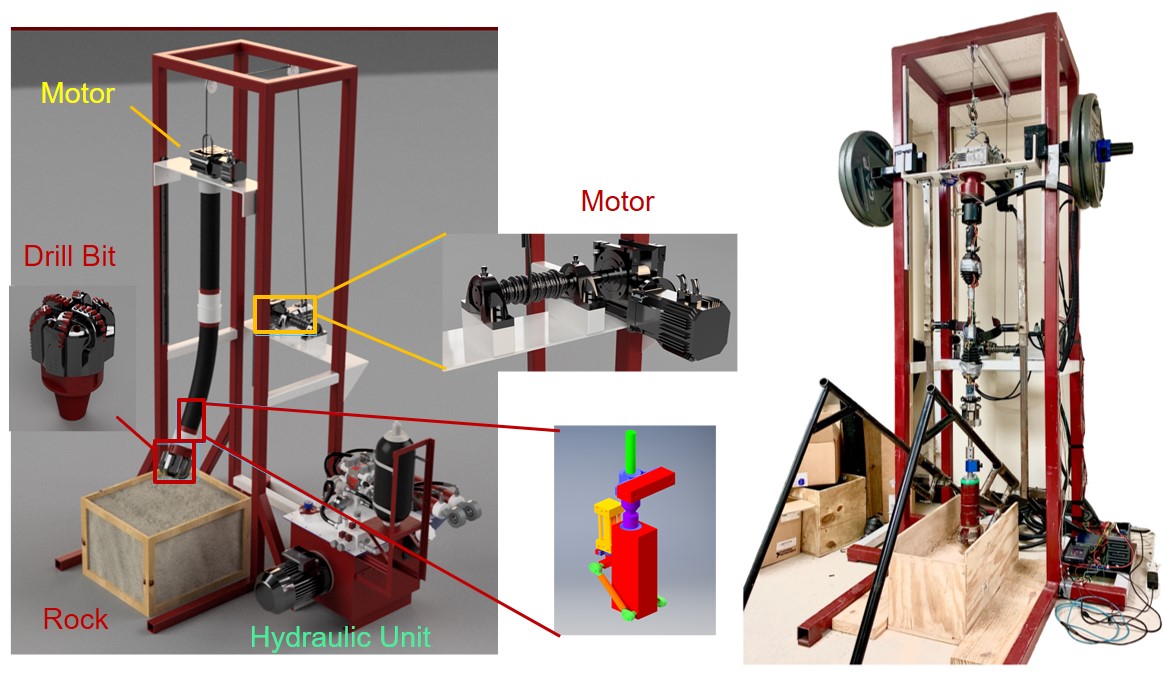
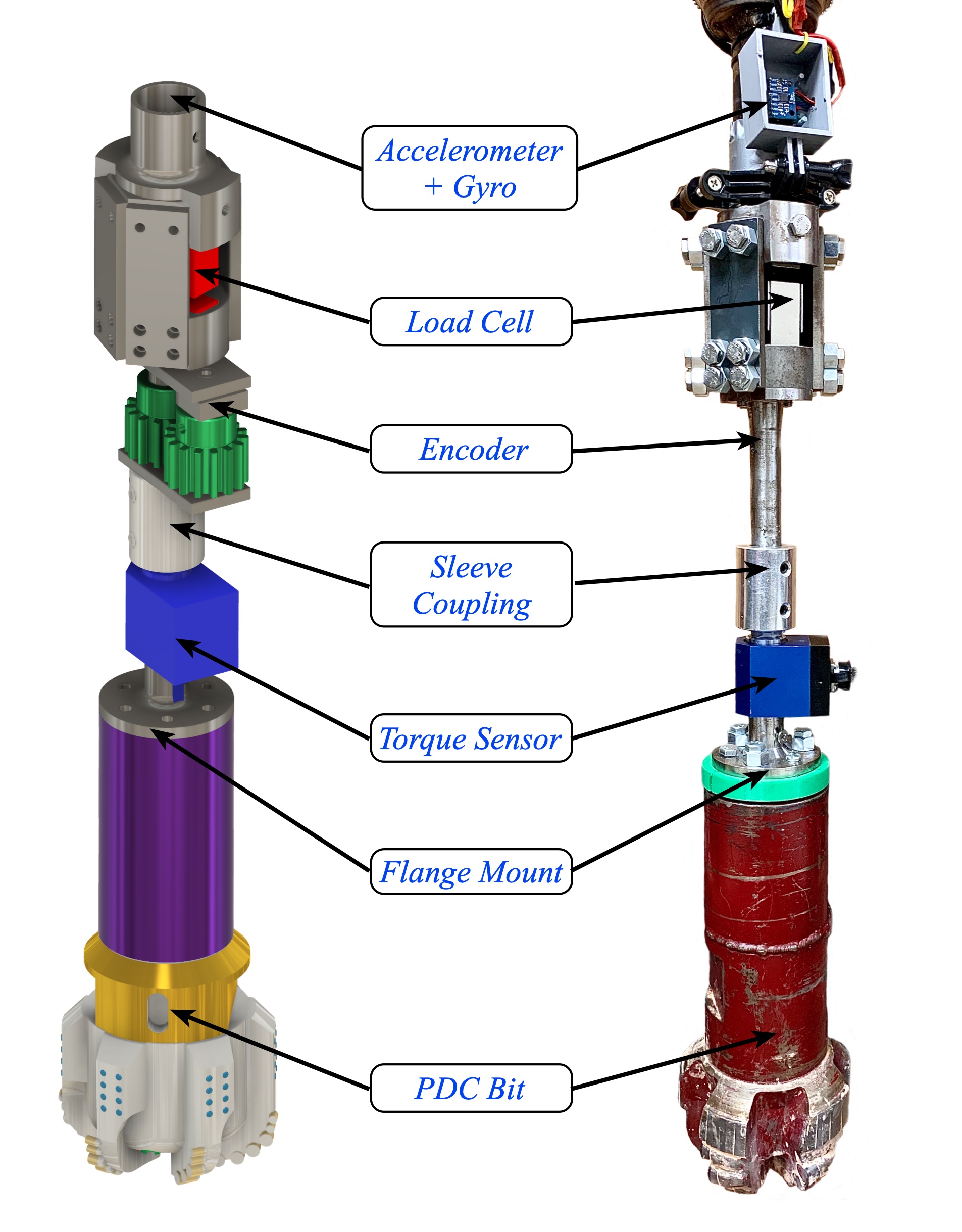
The goal of this project is to enable fully autonomous directional drilling for oil and gas applications. Novel optimal and robust control systems are designed based on the developed models and are tested with several inline sensors. The sensor module is shown on the bottom left. The automation and control system is tested in a Lab-scale drilling rig for down-hole behavior validation. The Lab-scale drilling rig is capable of angled drilling up to 70 degrees with 500 pounds of downward force.
 Powertrain Energy Management for Autonomous and Connected Vehicles (Funded by National Science Foundation)
Powertrain Energy Management for Autonomous and Connected Vehicles (Funded by National Science Foundation)
Vehicle powertrain energy management that leverages connectivity and autonomy. Cooperative control design for optimized autonomous driving.
 Modeling and Control for Autonomous and Connected Off-road Vehicles (Funded by the Department of Energy)
Modeling and Control for Autonomous and Connected Off-road Vehicles (Funded by the Department of Energy)
Machine intelligence and control optimization for autonomous and connected off-road Vehicles, particularly for autonomous machines and vehicles used in construction and mining industries.
Real-Time Off-shore Down-hole Condition Estimation and Safety Enhancement Based on Delayed Mud-Telemetry Data (Funded by National Academy of Science (NAS) GRP Early Career Research Fellow Award)
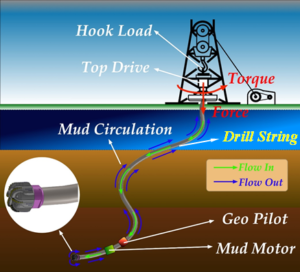
In real-time down-hole condition information and drilling system states estimation is critical. Measurements transmitted to the surface has a significant delay due to mud-pulsing telemetry and the delay causes challenges to drilling control. A method to estimate current down-hole condition and real-time drilling system states is being developed.
 Vision-Based Automatic Pipe Crack Detection (Industry Project)
Vision-Based Automatic Pipe Crack Detection (Industry Project)
Automatic magnetic particle inspection system for drilling pipe manufacturer using computer vision to detect surface cracks with depths of less than a millimeter.
 Vision-Based Catalyst Filling Automation (Industry Project)
Vision-Based Catalyst Filling Automation (Industry Project)
Automated system to control tube motion and fill tube automatically while avoiding contact between the fluid in the tube and nozzle.
Control Theory Research (Funded by Vibration Institute and Other Mixed Sources)
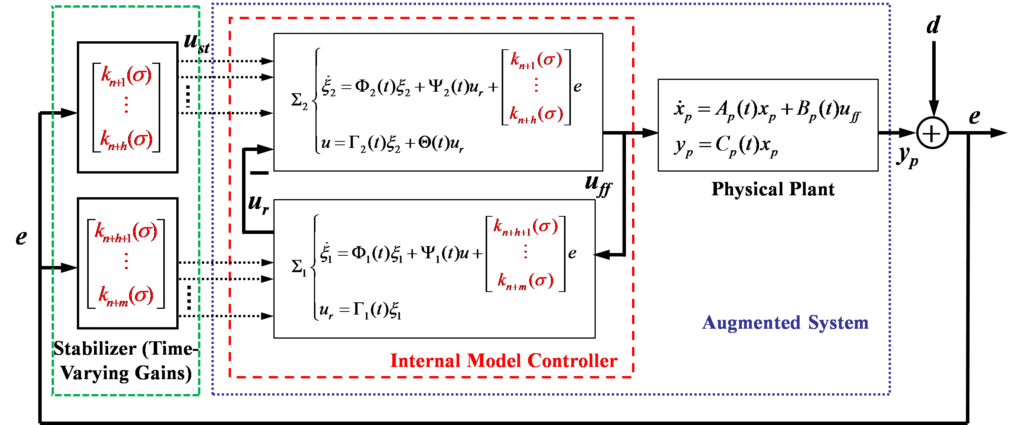
Time-Varying Internal Model Based Control, Tracking and Disturbance Rejection for Nonlinear Systems, State Barrier Constrained Control for Nonlinear Systems, Approximate Dynamic Programming, Data Based Intelligent Control, Reinforcement Learning, etc.